高德推出全球首款开放环境全自主具身机器人,背后ABot全栈体系横扫15项SOTA,世界模型即将开源。

高德推出全球首款开放环境全自主具身机器人,背后ABot全栈体系横扫15项SOTA,世界模型即将开源。
在2026北京亦庄人形机器人半程马拉松上,一只四足机器人带着视障少年完成了障碍赛——它不依赖预设路线,不需要人工遥控,能在真实开放环境中自主判断路线、独立行动。它是"高德途途",全球首款开放环境全自主具身机器人。
驱动它的不是某个单点模型,而是一套完整的技术体系:ABot。
ABot 是高德推出的首个面向AGI的全栈具身技术体系,包含三层架构:
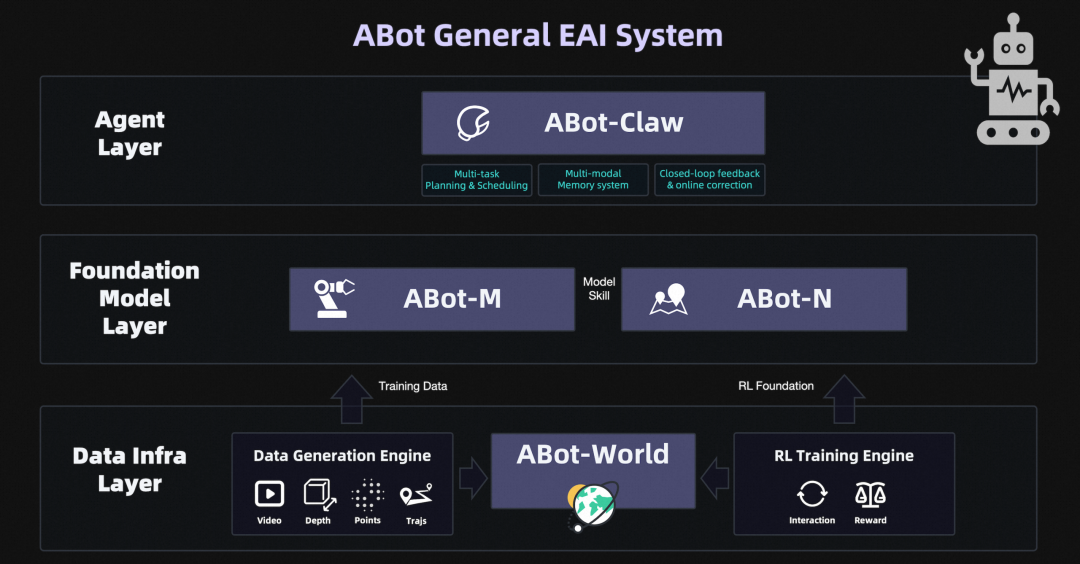
这套体系横扫了具身智能领域15项SOTA,世界模型在CVPR 2026 Video World Model Workshop国际挑战赛中分数超过谷歌和英伟达。
ABot-N0 将导航从"多任务拼接"重构为一个统一模型驱动的体系。同一个"导航大脑"可以在四足、轮式和人形等不同机器人上复用。
它一对多地处理五大类核心导航任务:
| 任务类型 | 说明 |
|---|---|
| Point-Goal | 按坐标走到指定位置 |
| Object-Goal | 在陌生环境找到目标物 |
| Instruction-Following | 理解并执行复杂指令 |
| Person-Following | 跟随行人在动态环境中移动 |
| POI-Goal | 识别并导航至兴趣点入口 |
ABot-N0 的架构分为三层:
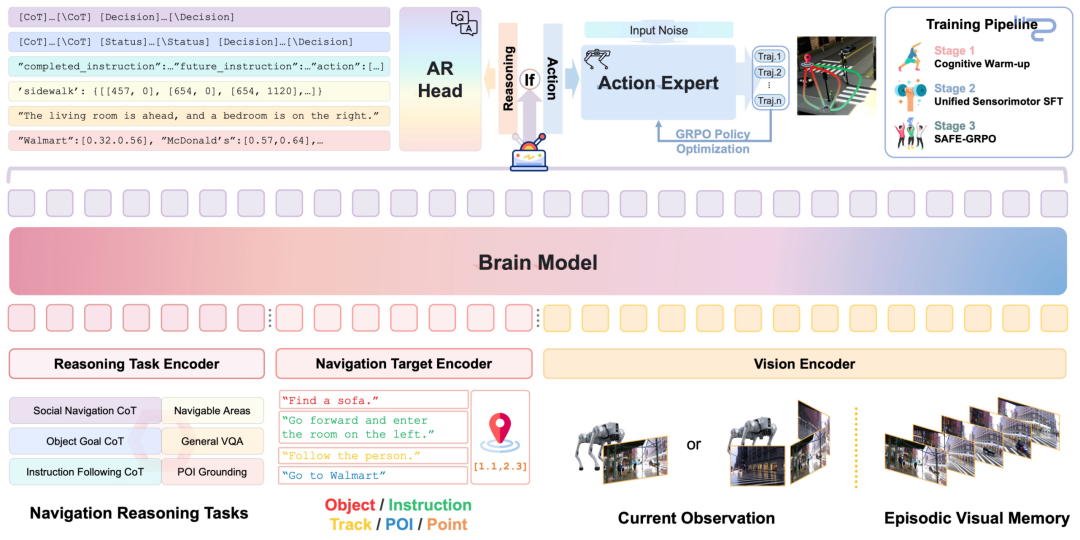
ABot-N0 背后是目前具身智能领域最大的数据引擎:7802个高保真3D场景、1690万条专家轨迹、500万条推理样本。
如果说 ABot-N0 解决"往哪走",ABot-M0 就负责"怎么做"。
ABot-M0 没有围绕某一类机器人或任务单独建模,而是用一套统一的动作表示,把来自不同来源、不同形态的数据放到同一个体系里。
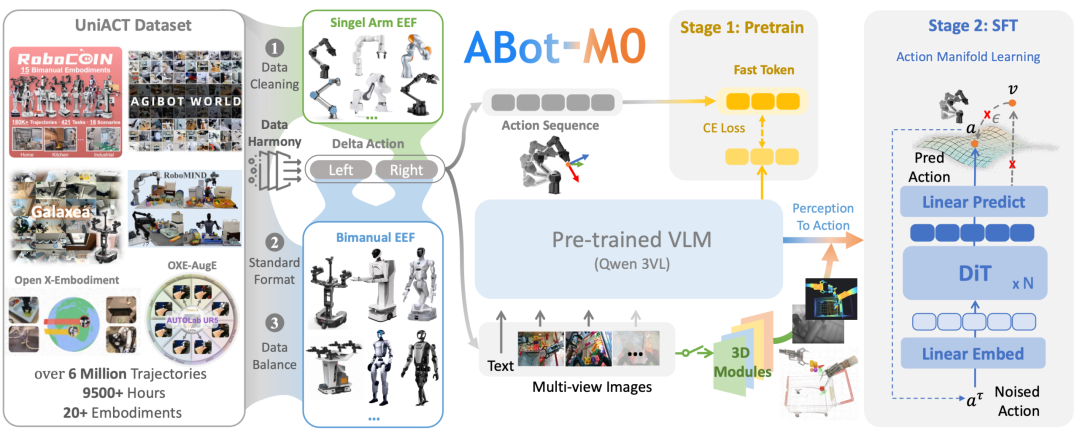
在 Libero-Plus 基准上任务成功率达80.5%,相比此前标杆方案提升近30个百分点。
ABot-World 是整套体系的地基,由双引擎驱动:
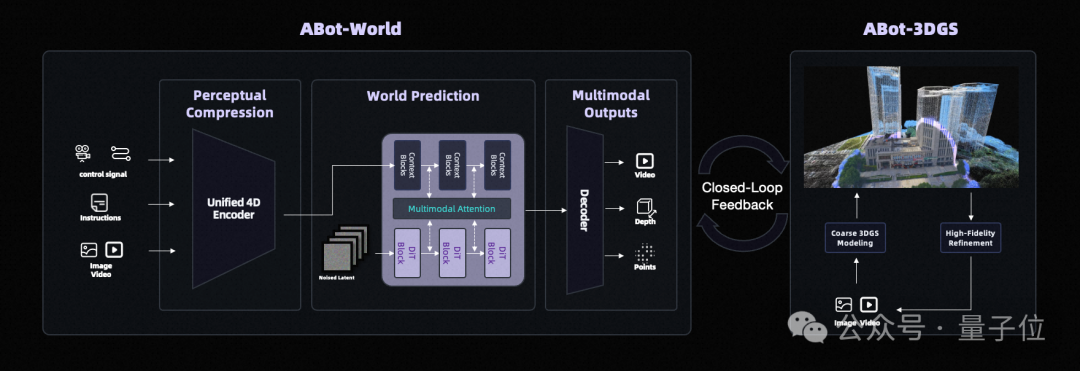
ABot-3DGS 的工作流程可以概括为"一翻译二重建三Run":
ABot-PhysWorld 的关键突破在于:它不追求"画面看起来像",而是追求"物理上说得通"。物体不会穿透、夹爪不会无接触抓取、动作不会反重力悬浮。
ABot-Claw 负责把所有能力统一调度起来:
新设备接入后直接继承已有认知,过去的成功和失败都会被记录和复用。
高德已宣布将 ABot-World 开源,为所有开发者提供统一的、物理合规的、可进化的机器人世界模型操作系统。
相关资源:
高德途途在导盲场景的验证说明,ABot体系已经具备处理开放环境、长程任务、极高安全要求的能力。同样的能力线可以延伸到:

OpenAI 推出 Codex Security 插件,在 Codex 里一键扫描代码漏洞、验证可利用性并给出修复方案,附带完整上手步骤。

字节跳动图像模型 Seedream 5.0 Pro 上线火山引擎 API,主打局部精准编辑、14 语种文字生成与图层分离。

百度开源 Unlimited OCR,在 DeepSeek OCR 基础上引入 R-SWA 注意力机制,让 OCR 模型在 32K 标准上下文内单次前向推理解析数十页文档,OmniDocBench v1.5 拿下 93.23% 端到端 SOTA。